《XPeng》想刺激《Tesla》?《小鵬電動車》3000km中國最長自駕紀錄!之後等《Model Y》來挑戰

▲小鵬電動車總部位於廣州,參與「高速公路3000公里實戰」自動駕駛測試車隊多達12~15輛,使用車型為XPeng P7。
近期Tesla為著《自動駕駛系統並未突破Level 2》之風波大傷腦筋,但來自中國的小鵬電動車XPeng並沒有在一旁幸災樂禍,反而加緊《自動駕駛科技》研發腳步,率先完成「廣州→北京」超過3600km之自駕測試,這是中國目前量產車型最長的高速公路自動駕駛實測挑戰,此一新紀錄顯然令Tesla感到相當大的壓力。
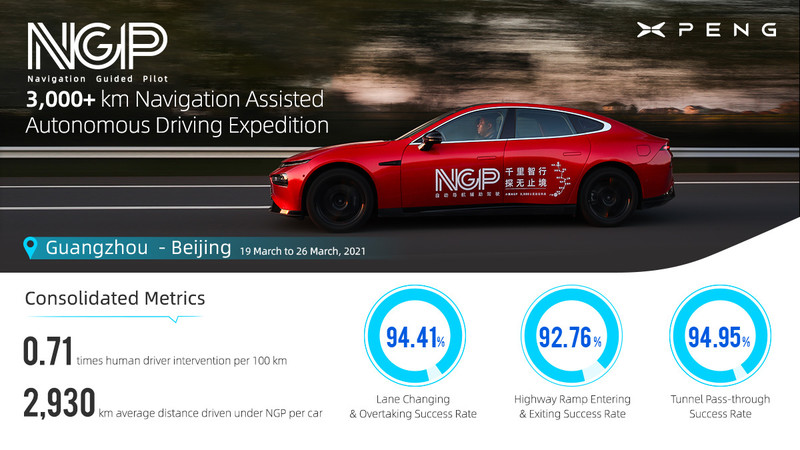
小鵬電動車XPeng於2021年3月31日宣布了自動駕駛科技新紀元,小鵬旗下純電動車款《P7》車隊在NGP《Navigation Guided Pilot》自動駕駛系統的控制下,從廣州到北京,P7車隊行駛了3600多公里的路程,高速公路行駛了2,930 km,平均每100公里只有0.71人次的駕駛員干預,樹立新科技標杆~量產車型的遠程自動駕駛系統。



▲中國尚未全面開放高速公路自動駕駛測試,所以自駕車隊仍須進行道路區域管制,避免發生任何意外「傷及無辜」,並選擇在清晨、夜間、離峰時刻進行,避開交通尖峰路段與時段,此外駕駛人還是要監控路況隨時控制方向盤不能一直玩手機,自駕系統會記錄駕駛者主動介入控制的次數與情況。當然,以中國的交通狀況來說,目前仍不適合在都會區市中心進行自駕挑戰,結果應該都是「頻頻卡在半路動彈不得」吧!
XPeng董事長兼首席執行官何小鵬,在北京的新聞發布會上說明:這次探險完全驗證《NGP》各項功能的穩固與可靠,結果證明,它不僅是功能最強大的自動駕駛系統,亦是市場上最容易使用的量產型自動駕駛系統。
何小鵬補充說到:我們努力成為世界上最大的自動駕駛硬件和軟件提供商,我們的戰略和研發能力,使我們能夠精準地實現這一目標。
在NGP的控制下,從2021年3月19日從廣州出發,至3月26日於北京結束的8天測試當中,車道變更和超車的平均成功率為94.41%。同期,高速公路匝道平均進出成功率為92.76%,隧道直通成功率為94.95%。
228名汽車線新聞記者、電動汽車愛好者、相關行業專家參與了此次的探險,他們駕駛著12至15輛P7(視日期而定),訪問了中國東部沿海地區六個省的10個城市。選擇該路線是為了涵蓋中國一部份最複雜但最具代表性的道路狀況和駕駛情況,以全面測試NGP的反應和有效性,但是不包含市區與越野路段,因此Tesla仍不需要太過緊張,NGP要通過Level 3自動駕駛門檻的考驗與認證,可能還要一段時間。



▲雨天、夜間、隧道行車困難度高,但是NGP都能順利克服,沒有發生意外,駕駛者主動介入車輛控制的頻率也非常低。
從廣州到北京,最佳行車路線其實只有2200公里左右,但是小鵬電動車選擇了較為複雜、多元的測試路線,純粹為了挑戰與驗證NGP的實力,包含無法接收GPS訊號的長隧道。
在為期8天的測試當中,NGP即便是在暴雨狀態穿越隧道和山區高速公路,均表現出卓越的性能,展現出在中國複雜駕駛環境下的穩定與可靠。
NGP高速公路自動駕駛系統基於駕駛員設置的導航路線,提供從A點到B點的導航輔助自動駕駛,目前在中國高精度地圖覆蓋的高速公路上都可以使用。它的全區域高精準定位功能,克服了中國高度複雜的道路環境,包括無GPS信號的區域的定位挑戰,然而有沒有使用「AGPS」基地台定位功能或「慣性導航」輔助?相關訊息仍有待研究。
NGP基於純電動車P7強大的自動駕駛硬體結構,目前是中國量產車中最強大的系統,全車具有14個攝像頭,5個毫米波雷達,12個超音波感測器,高解析能力的GPS,搭配NVIDIA Xavier晶片與運算平台,以及Bosch iBooster控制系統。
360度環景影像對P7來說只是「一塊小蛋糕」,為了增進對於距離遠近最精確的辨識度,P7採用了雙鏡頭強化分析能力,可於高速行駛狀態還原車身四周的車輛與環境。當然這不只是鏡頭多寡的問題,軟體與晶片運算速度也要同步才行,不是一項簡單與便宜的科技,並非「市區自駕困難、高速自駕簡單」,其實每一關都很困難。不過小鵬汽車勇於讓媒體、電動車主、專業人士於測試過程中全程參與,至少證明了P7自駕科技的純熟與透明,絕非「官方宣稱」避免黑箱作業之嫌。



▲高速公路行駛並非「一路到底」,小鵬電動車特別選定迂迴路線,在沿海各大城市間穿梭,自駕車輛必須在數條高速公路間切換奔馳,考驗行車精準性。但更重要的是,P7車隊乃是以高速公路法規車速行駛,並非「龜速」自駕,困難度並不低,但是距離Level 3仍有一段距離,別以為小鵬P7真的可以讓駕駛者從廣州一路睡到北京,目前強行的話,應該會直達天國吧!